4月25日-4月27日,由国家自然基金委主办,中国电子学会、中国机械工程学会、中国北方车辆研究所承办的2018年“世界机器人大赛-共融机器人挑战赛”在北京举行。经过激烈角逐,我院姚建涛教授带领李海利、陈俊涛、陈新博、柳春烨四名研究生获得创意组唯一的一等奖。

组委会专家为我院参赛代表颁奖
“世界机器人大赛-共融机器人挑战赛”是国家自然科学基金委员会“共融机器人基础理论与关键技术研究”重大研究计划支持下,于2018年首次举办的机器人领域高水平赛事。大赛奉行“聚合、创新、创造”三步走理念,以“人-机-环境共融”为主题,邀请了国内机器人领域知名专家担任评委,吸引了来自北京大学、上海交通大学、华中科技大学、吉林大学等众多知名高校的顶尖机器人科研团队携近百件作品参加大赛。
我院软体机器人科研团队参赛作品为“基于仿生缠绕效应的大承载软体抓持装置”,该作品的灵感来源于自然界动植物的缠绕现象,运用工程仿生技术设计并制作了一种大负载软体抓持装置,借鉴仿生缠绕理念,通过巧妙构型设计,大幅提升了目前软体抓持装置的承载能力,相关研究成果已申请了国际发明专利。在参赛过程中,该作品以高度的概念新颖性和性能完整性获得了评委专家的充分肯定和一致好评,在众多来自国内顶尖高校的作品中脱颖而出,获得创意组一等奖。
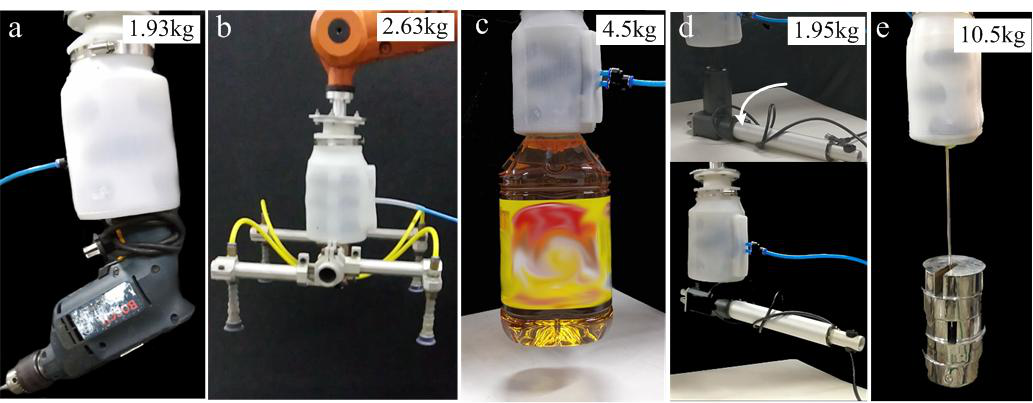
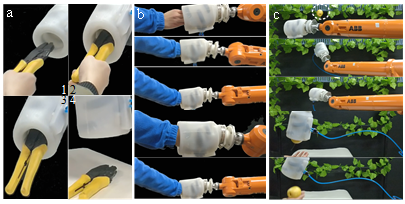
我院参赛作品
我院软体机器人科研团队依托于赵永生教授科研团队,自2015年组建以来,在姚建涛教授的指导下,密切关注国际软体机器人前沿动态,深入探索软体机器人发展方向,不断进行技术积累和理论创新,已开发出多种软体机器人系统,取得了良好的科研成果,申请国家发明专利10余项。

获奖团队合影









